ビン・ピッキングロボット

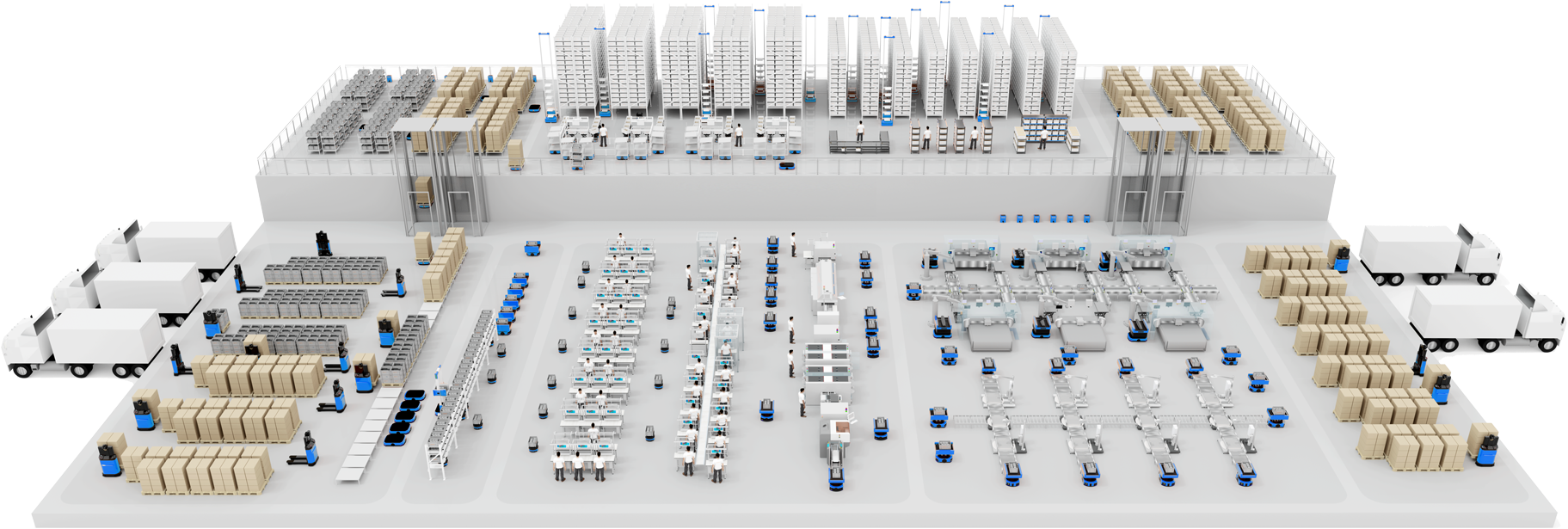
DYNALOGIのビン・ピッキングロボットは、倉庫運営を根本から革新する多機能な自律移動型ロボットです。インテリジェントな設計により、最大12メートルの高さまで貨物を垂直に保管でき、限られたスペースを有効に活用。保管容量の最適化と、在庫の高精度な管理を同時に実現します。また、高度なナビゲーション、高速・高精度なピッキングと搬送、既存システムとのシームレスな連携、安全性の高い制御機能を兼ね備えており、さまざまな業界で作業効率と処理スピードを大幅に向上させ、人的コストの削減にも大きく貢献します。
高品質な製品
高性能センサー搭載
柔軟な構成
広いピッキング範囲
最大12mの保管高さ対応
-BD1-webp.webp)

-BV2-webp.webp)
-BD1-md.webp)
-BS1-md.webp)


-BD2-md.webp)
-BS2-md.webp)
-BV2-md.webp)
-BX2-md.webp)